Array antennas
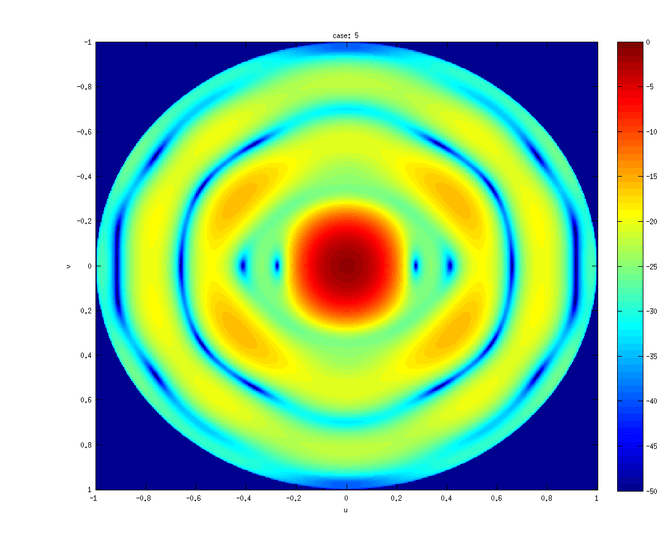
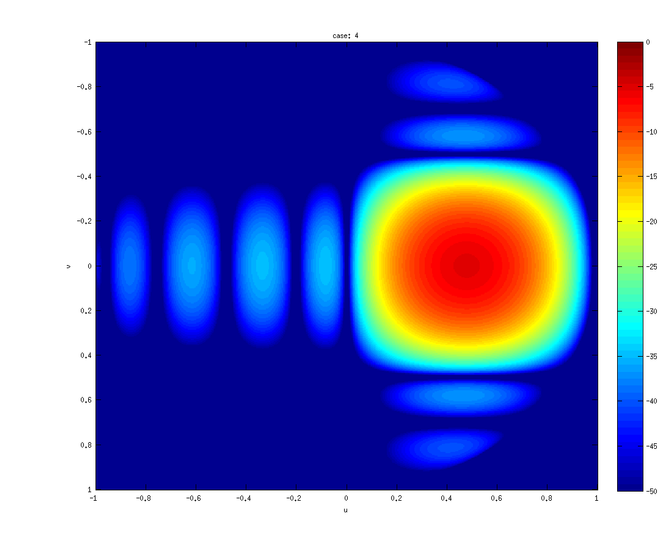
In antenna array design it is convinient to have a fast tool that supports antenna farfield analysis for various hardware artifacts. This is used to obtain a fast feedback during the concept studies. Thereafter, implementation and analysis is made in various EM-computational tools such as HFSS, CST MICROWAVE STUDIO, ADS Momentum.
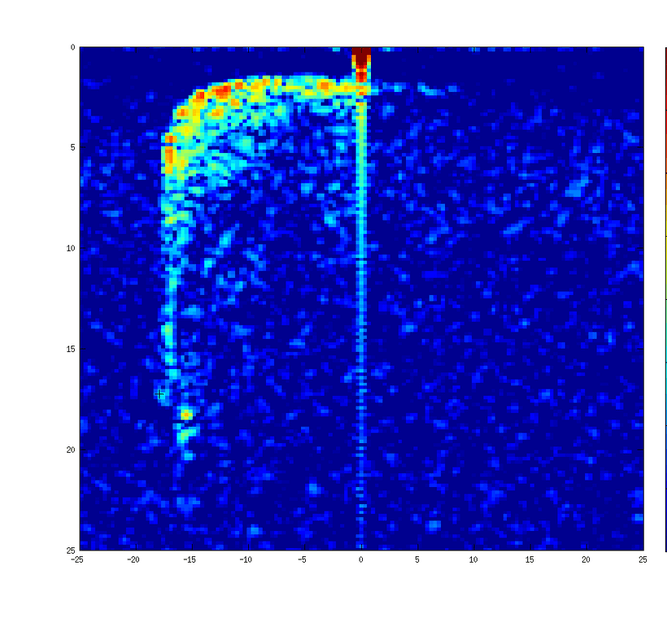
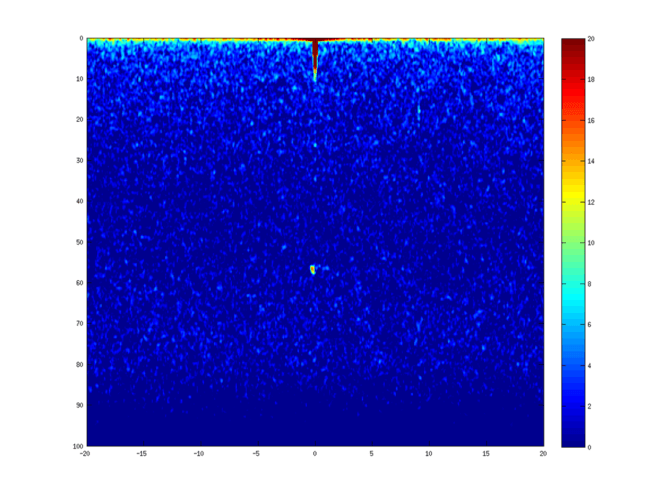
Moreover the farfield results (and/or steering vector outcomes for multi-channel cases) are then used for the radar simulation tool where for instance detection and estimation performances are examined.